EEPW首頁(yè) >>
主題列表 >>
pc dram
pc dram 文章 最新資訊
SK 海力士據(jù)報(bào)道將 DDR4/ LPDDR4X 合同價(jià)格上調(diào) 20%,因 Q3 需求保持強(qiáng)勁
- 隨著內(nèi)存制造商逐步淘汰 DDR4,預(yù)計(jì)出貨將在 2026 年初結(jié)束,合同價(jià)格持續(xù)上漲。據(jù)中國(guó)的 華爾街見(jiàn)聞 報(bào)道,SK 海力士已將 DDR4 和 LPDDR4X 內(nèi)存的合同價(jià)格上調(diào)約 20%,標(biāo)志著新一輪價(jià)格上漲。這種趨勢(shì)與 TrendForce 的發(fā)現(xiàn)相呼應(yīng),該機(jī)構(gòu)指出,三大主要 DRAM 供應(yīng)商正在將產(chǎn)能重新分配給高端產(chǎn)品,并逐步淘汰 PC、服務(wù)器級(jí) DDR4 和移動(dòng) LPDDR4X。因此,據(jù) TrendForce 預(yù)測(cè),2025 年第三季度主流 DRAM 的平
- 關(guān)鍵字: DDR4 DRAM 存儲(chǔ)
內(nèi)存現(xiàn)貨價(jià)格更新:16Gb DDR4 消費(fèi)者內(nèi)存價(jià)格上升,而 PC 內(nèi)存失去動(dòng)力
- 根據(jù) TrendForce 最新的內(nèi)存現(xiàn)貨價(jià)格趨勢(shì)報(bào)告,關(guān)于 DRAM,16Gb DDR4 消費(fèi)者內(nèi)存芯片的現(xiàn)貨價(jià)格持續(xù)上漲,而 8Gb DDR4 等 PC 內(nèi)存芯片則出現(xiàn)輕微回調(diào)。至于 NAND 閃存,供應(yīng)商逐步釋放產(chǎn)能資源,加上中國(guó)國(guó)家補(bǔ)貼的減弱效應(yīng),導(dǎo)致現(xiàn)貨市場(chǎng)低迷。詳情如下:DRAM 現(xiàn)貨價(jià)格:盡管過(guò)去一周現(xiàn)貨價(jià)格略有下降,但這主要反映了之前 DDR4 芯片價(jià)格的快速大幅上漲。整體供應(yīng)仍然非常緊張。值得注意的是,16Gb DDR4 消費(fèi)級(jí) DRAM 芯片的現(xiàn)貨價(jià)格繼續(xù)上漲,而 8Gb DDR4 等
- 關(guān)鍵字: 內(nèi)存 DDR4 DRAM
歷史性 DDR4 現(xiàn)貨價(jià)格飆升,據(jù)報(bào)道使 DDR5 翻倍,推動(dòng)南亞科技的庫(kù)存暴利
- 上周,臺(tái)灣地區(qū)頂級(jí) DRAM 制造商南亞科技據(jù)報(bào)道暫停了 DDR4 現(xiàn)貨報(bào)價(jià),因?yàn)閮r(jià)格飆升。現(xiàn)在,隨著 DDR4 16Gb 芯片的價(jià)格幾乎是同等 DDR5 的兩倍——這是 DRAM 歷史上的第一次——該公司有望從其大量庫(kù)存中獲利,根據(jù)經(jīng)濟(jì)日?qǐng)?bào)的最新數(shù)據(jù),引用了 DRAMeXchange 的數(shù)據(jù),DRAMeXchange 是一個(gè)趨勢(shì)力旗下的 DRAM 定價(jià)平臺(tái)。隨著三星、美光和中國(guó)芯片制造商縮減 DDR4 生產(chǎn),南亞科技已成為該行業(yè)的主要供應(yīng)商。據(jù)報(bào)告稱,南亞科技第一季度庫(kù)存飆升至創(chuàng)紀(jì)錄的 37.59 億新
- 關(guān)鍵字: DDR4 DRAM 存儲(chǔ)
適用于DRAM和處理器的3D堆棧集成
- 東京科學(xué)研究所在 IEEE電子元件和技術(shù)會(huì)議 ECTC 上透露了其 BBCube 3D 集成流程的進(jìn)展。“這些新技術(shù)可以幫助滿足高性能計(jì)算應(yīng)用的需求,這些應(yīng)用需要高內(nèi)存帶寬和低功耗以及降低電源噪聲,”該研究所表示。BBCube 結(jié)合使用晶圓上晶圓 (WOW) 和晶圓上芯片 (COW) 技術(shù),將處理器堆疊在一堆超薄 DRAM 芯片上。將處理器放在頂部有助于散熱,而該研究所的面朝下的 COW 工藝最初是為了擺脫焊接互連而開(kāi)發(fā)的,而是在室溫下使用噴墨選擇性粘合劑沉積。用于 300mm 晶圓,實(shí)現(xiàn)了 10μm 的
- 關(guān)鍵字: DRAM 處理器 3D堆棧集成
臺(tái)灣地區(qū)的 DRAM 供應(yīng)商南亞科技據(jù)報(bào)道暫停 DDR4 現(xiàn)貨價(jià)格報(bào)價(jià),庫(kù)存緊張
- 隨著三星和美光等主要內(nèi)存制造商減少 DDR4 生產(chǎn)并價(jià)格上漲,據(jù)報(bào)道,臺(tái)灣地區(qū)的主要供應(yīng)商南亞科技已暫停報(bào)價(jià),這表明供應(yīng)緊張和需求增長(zhǎng),據(jù)經(jīng)濟(jì)日?qǐng)?bào)報(bào)道。行業(yè)消息人士進(jìn)一步解釋說(shuō),報(bào)價(jià)暫停主要發(fā)生在現(xiàn)貨市場(chǎng),而在合同市場(chǎng),供應(yīng)商正在囤積庫(kù)存并穩(wěn)步推高價(jià)格。TrendForce 的最新調(diào)查發(fā)現(xiàn),由于兩大主要 DRAM 供應(yīng)商減少 DDR4 生產(chǎn)以及買家在美國(guó)關(guān)稅變化前加速采購(gòu),服務(wù)器和 PC 的 DDR4 合同價(jià)格預(yù)計(jì)將在 2025 年第二季度大幅上漲。因此,服務(wù)器 DDR4 合同價(jià)格預(yù)計(jì)環(huán)比將上漲
- 關(guān)鍵字: DRAM 存儲(chǔ) 市場(chǎng)分析
DDR4瘋狂漲價(jià),DRAM廠商爆賺

- 據(jù)臺(tái)媒《經(jīng)濟(jì)日?qǐng)?bào)》報(bào)道,由于DDR4供應(yīng)減少,再加上市場(chǎng)神秘買家大舉出手掃貨,最新的8Gb/16Gb DDR4 DRAM現(xiàn)貨價(jià)等規(guī)格單日都暴漲近8%。本季以來(lái)報(bào)價(jià)已翻漲一倍以上,不僅跨過(guò)DRAM廠損益平衡點(diǎn),更達(dá)到讓廠商暴賺的水平。如今DDR4不僅報(bào)價(jià)大漲,甚至比更高規(guī)格的DDR5報(bào)價(jià)更高,呈現(xiàn)“價(jià)格倒掛”,業(yè)界直言:“至少十年沒(méi)看過(guò)現(xiàn)貨價(jià)單日漲幅這么大。”根據(jù)DRAM專業(yè)報(bào)價(jià)網(wǎng)站DRAMeXchange最新報(bào)價(jià)顯示,6月13日晚間DDR4現(xiàn)貨價(jià)全面暴漲,DDR4 8Gb(1G×8)3200大漲7.8%,
- 關(guān)鍵字: DDR4 DRAM 三星 美光 南亞科技 華邦電子 HBM
英偉達(dá)Arm PC芯片亮相即巔峰?
- 一塊搭載了英偉達(dá)N1X處理器的惠普開(kāi)發(fā)板(HP 83A3)在Geekbench上亮相。在Geekbench的測(cè)試中,運(yùn)行Linux(Ubuntu 24.04.1)的N1X處理器在單核測(cè)試中獲得了3096分,在多核測(cè)試中獲得了18837分,平均頻率為4GHz。數(shù)據(jù)顯示這款處理器為20線程配置,由于Arm通常沒(méi)有像英特爾那樣的超線程技術(shù),因此很可能是20個(gè)物理核心,類似于英偉達(dá)迷你超算所搭載的GB10。同時(shí),該開(kāi)發(fā)板可能配備128GB系統(tǒng)內(nèi)存,其中8GB預(yù)留給GPU。其性能已經(jīng)接近甚至超過(guò)了當(dāng)前市場(chǎng)上的一些頂
- 關(guān)鍵字: 英偉達(dá) Arm PC 芯片 SoC 處理器 聯(lián)發(fā)科
AI PC新突破 端側(cè)首次支持128K上下文窗口 實(shí)現(xiàn)2.2倍推理優(yōu)化
- 端側(cè)AI里程碑:面壁大模型+英特爾酷睿Ultra首日協(xié)同優(yōu)化效率提升220%;面壁智能端側(cè)大模型首日上線,英特爾工程師聯(lián)合優(yōu)化實(shí)現(xiàn)2.2倍推理效率躍升;AI PC時(shí)代加速:面壁智能端側(cè)大模型適配酷睿Ultra,效率提升220%;推理速率提升2.2倍!面壁推出MiniCPM 4.0系列LLM模型,英特爾助力帶來(lái)端側(cè)性能體驗(yàn);英特爾銳炫B60聯(lián)合面壁MiniCPM 4.0,端側(cè)首次支持高達(dá)128K上下文窗口
- 關(guān)鍵字: AI PC 推理優(yōu)化 面壁 英特爾
英特爾+軟銀聯(lián)手劍指HBM

- 美國(guó)芯片巨頭英特爾已與日本科技和投資巨頭軟銀攜手,合作開(kāi)發(fā)一種堆疊式DRAM解決方案,以替代高帶寬存儲(chǔ)器(HBM)。據(jù)報(bào)道,雙方已合資成立新公司Saimemory共同打造原型產(chǎn)品,該項(xiàng)目將利用英特爾的芯片堆疊技術(shù)以及東京大學(xué)持有的數(shù)據(jù)傳輸專利,軟銀則以30億日元注資成為最大股東(總投資約100億日元)。該合作計(jì)劃于2027年完成原型開(kāi)發(fā)并評(píng)估量產(chǎn)可行性,目標(biāo)是在2030年前實(shí)現(xiàn)商業(yè)化。Saimemory將主要專注于芯片的設(shè)計(jì)工作以及專利管理,而芯片的制造環(huán)節(jié)則將交由外部代工廠負(fù)責(zé)這種分工模式有助于充分發(fā)揮
- 關(guān)鍵字: 英特爾 軟銀 HBM DRAM 三星 SK海力士
Microsoft希望各USB-C版本在所有PC上都能一致地工作

- 自從 USB Implementers Forum 技術(shù)演示以來(lái),我們一直在介紹小型、可逆的 USB Type-C 連接器,從那時(shí)起的十多年里,該端口逐漸風(fēng)靡全球。它逐漸從筆記本電腦遷移到游戲機(jī)、PC 配件、Android 手機(jī)、電子閱讀器和 iPhone。盡管存在一些問(wèn)題和缺點(diǎn),但與十年前相比,我們更接近于一個(gè)可以做所有事情的單一連接器。但其中一些困惑仍然存在。USB-C 從一開(kāi)始就內(nèi)置的一個(gè)弱點(diǎn)是,物理連接器的規(guī)格總是與 USB 協(xié)議本身的規(guī)格(即給定端口能夠達(dá)到的數(shù)據(jù)傳輸速度)、用于充電的
- 關(guān)鍵字: Microsoft USB-C PC
三星考慮進(jìn)行大規(guī)模內(nèi)部重組

- 據(jù)韓媒SEDaily報(bào)道,三星半導(dǎo)體部門(即DS設(shè)備解決方案部)正對(duì)系統(tǒng)LSI業(yè)務(wù)的組織運(yùn)作方式的調(diào)整計(jì)劃進(jìn)行最終審議,相關(guān)決定將在不久后公布。預(yù)計(jì)在由副董事長(zhǎng)鄭鉉鎬和DS部門負(fù)責(zé)人全永鉉做出最終決定之前,還將進(jìn)行更多高層討論,并聽(tīng)取董事長(zhǎng)李在镕的意見(jiàn)。系統(tǒng)LSI業(yè)務(wù)主要負(fù)責(zé)芯片設(shè)計(jì),在三星半導(dǎo)體體系中承擔(dān)著為移動(dòng)業(yè)務(wù)(MX)部門開(kāi)發(fā)Exynos手機(jī)SoC的核心任務(wù)。然而,近年來(lái)Exynos 2x00系列應(yīng)用處理器在三星Galaxy S/Z系列高端智能手機(jī)中的采用率明顯下降,不僅削弱了MX部門的利潤(rùn)空間,
- 關(guān)鍵字: 三星 HBM LSI DRAM 半導(dǎo)體 晶圓代工
DDR5上升趨勢(shì)放緩;DRAM價(jià)格在第三季度將適度上漲
- 根據(jù) TrendForce 集邦咨詢最新的內(nèi)存現(xiàn)貨價(jià)格趨勢(shì)報(bào)告,DRAM 方面,DDR5 價(jià)格已顯現(xiàn)放緩跡象,預(yù)計(jì) 25 年第三季度整體 DRAM 價(jià)格漲幅將有所緩和。至于 NAND 閃存,現(xiàn)貨價(jià)格在 2 月下旬以來(lái)上漲后已達(dá)到相對(duì)較高的水平,購(gòu)買勢(shì)頭現(xiàn)在正在降溫。詳情如下:DRAM 現(xiàn)貨價(jià)格:與 DDR4 產(chǎn)品相比,DDR5 產(chǎn)品仍然會(huì)出現(xiàn)小幅現(xiàn)貨價(jià)格上漲。然而,DDR5 產(chǎn)品的平均現(xiàn)貨價(jià)格已經(jīng)相當(dāng)高,在某些情況下甚至高于合同價(jià)格。因此,上升趨勢(shì)最近有所緩和。組件公司和現(xiàn)貨交易員仍然更愿意接受 DDR4
- 關(guān)鍵字: DDR5 DRAM
傳英特爾考慮剝離網(wǎng)絡(luò)和邊緣業(yè)務(wù),以專注于PC和數(shù)據(jù)中心
- 據(jù)路透社報(bào)道,據(jù)報(bào)道,英特爾正在考慮剝離其網(wǎng)絡(luò)和邊緣業(yè)務(wù)組 (NEX),以專注于 PC 和數(shù)據(jù)中心。計(jì)劃包括出售該部門并將其與另一家公司合作。據(jù)說(shuō)英特爾已經(jīng)與其他公司談過(guò)這個(gè)計(jì)劃。4 月,它以 87.5 億美元的價(jià)格將 Altera 51% 的股份出售給 Silver Lake。之前的合作伙伴關(guān)系銷售是與投資公司 Apollo 進(jìn)行的,Apollo 斥資 110 億美元收購(gòu)了英特爾在愛(ài)爾蘭的 Fab 34 49% 的股份,另一家是英特爾將其 IMS 納米制造業(yè)務(wù) 20% 的股份出售給貝恩資本據(jù)說(shuō)英特爾已經(jīng)
- 關(guān)鍵字: 英特爾 網(wǎng)絡(luò)和邊緣業(yè)務(wù) PC 數(shù)據(jù)中心
華為發(fā)布可折疊PC:全球最大雙層OLED顯示屏
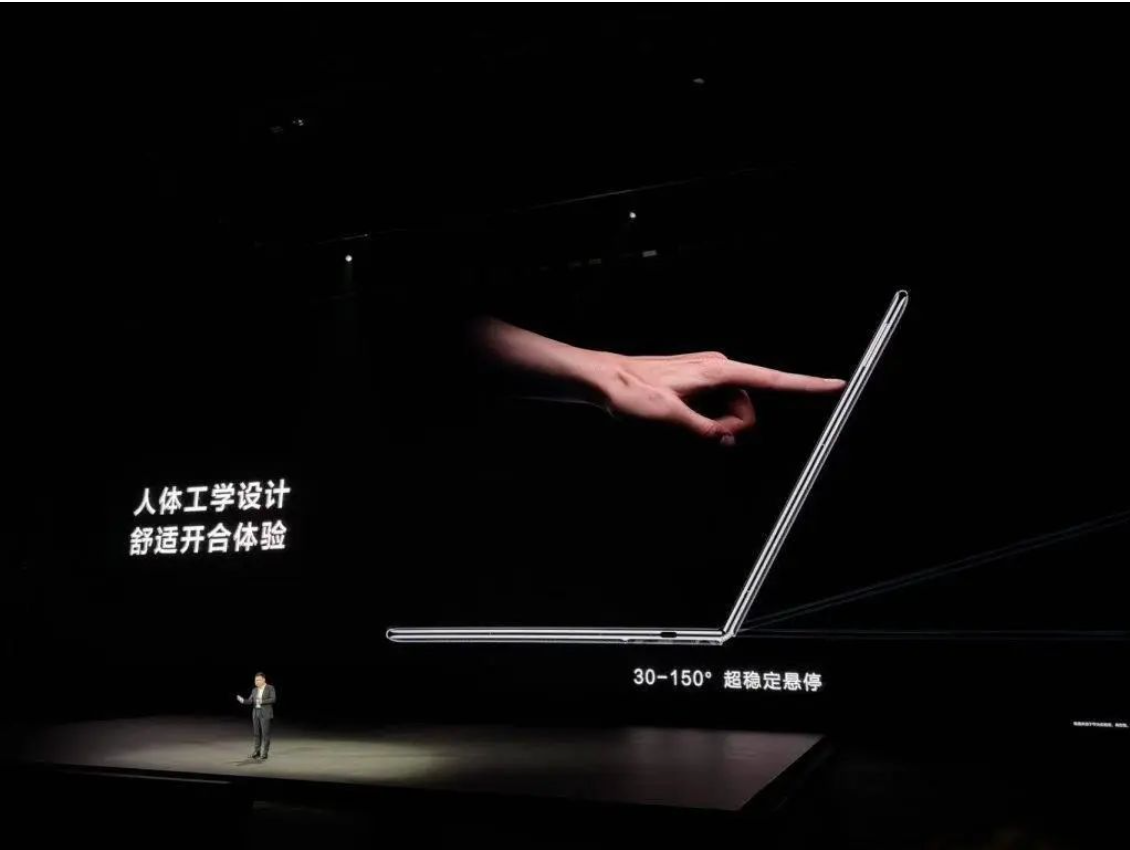
- 5月19日下午,華為召開(kāi)新品發(fā)布會(huì),其中最重磅的產(chǎn)品當(dāng)然是形態(tài)頗為另類的 —— MateBook Fold折疊電腦,有32GB+1TB和32GB+1TB兩個(gè)版本,售價(jià)分別為23999元和26999元。超大折MateBook Fold華為MateBook Fold采用了全球最大的雙層OLED顯示屏,也是行業(yè)中首次采用LTPO技術(shù)的電腦顯示屏,支持自適應(yīng)刷新率。這塊屏幕HDR峰值亮度為1600nits,分辨率為3.3K。屏幕展開(kāi)后屏幕尺寸為18英寸,比例為4:3 ,折疊狀態(tài)下尺寸為13英寸,比例為3:2,整機(jī)
- 關(guān)鍵字: 華為 可折疊 PC OLED 顯示屏
pc dram介紹
您好,目前還沒(méi)有人創(chuàng)建詞條pc dram!
歡迎您創(chuàng)建該詞條,闡述對(duì)pc dram的理解,并與今后在此搜索pc dram的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對(duì)pc dram的理解,并與今后在此搜索pc dram的朋友們分享。 創(chuàng)建詞條


pc dram相關(guān)帖子
pc dram資料下載
pc dram專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司